Building robots that
understand the world.
I'm a Robotics Engineer currently pursuing my MSc at TU Delft one of Europe's top engineering universities. My work sits at the intersection of motion planning, autonomous navigation, and real-world deployment.
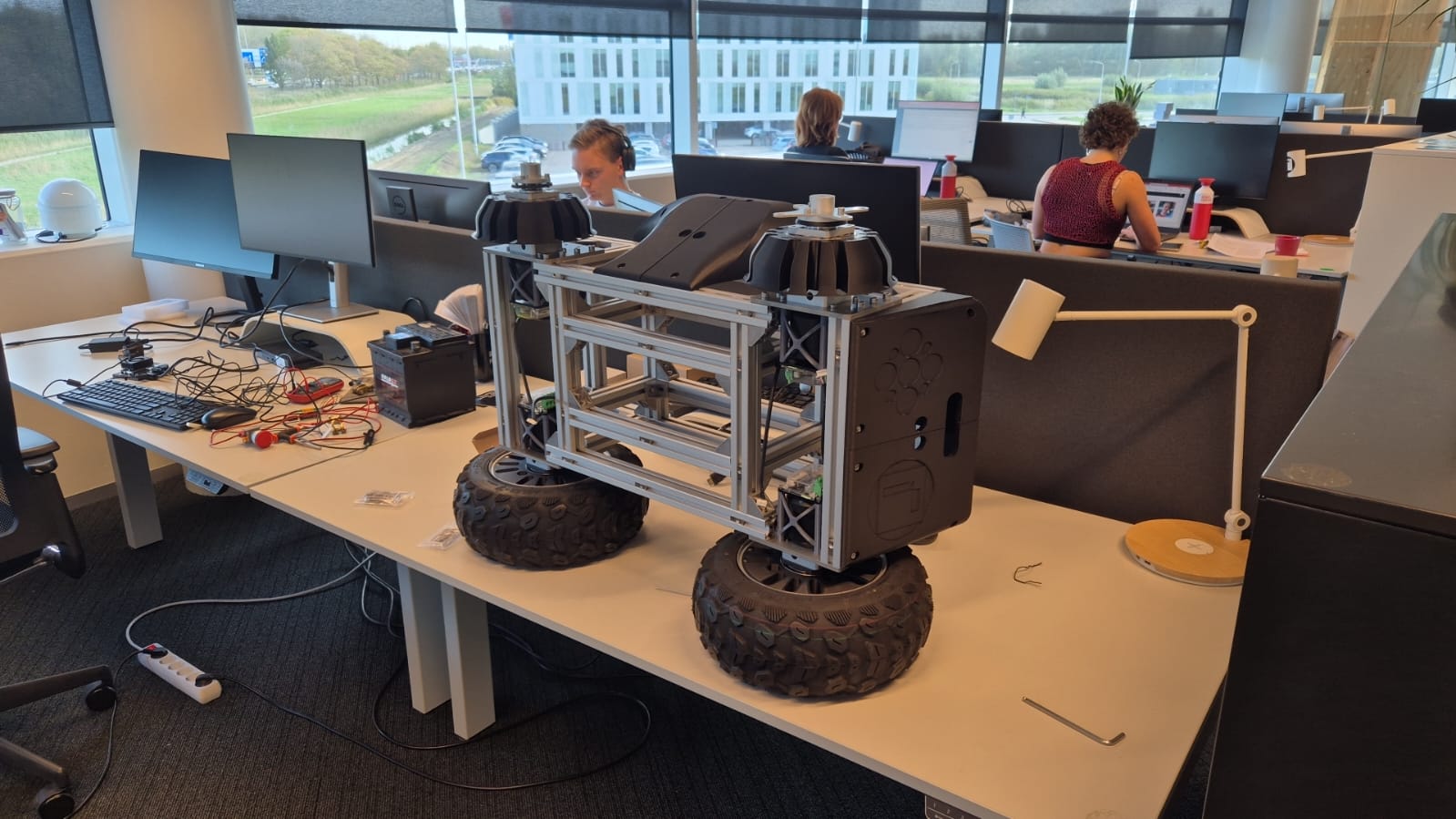
Alongside my studies, I work part-time at RoboHouse as a Software Engineer, where I built a skid-steer robot from the ground up, from hardware integration to the full ROS2 autonomy stack. That platform is now the foundation of my thesis: a terrain-aware MPPI controller I'm developing under the project I call SLIP Scalable Locomotion for Imperfect Places.
Before Delft, I spent my time in industrial robotics and automation working with Dassault Systèmes, with startups on AMRs, and competing in hackathons. I care about robots that actually work outside the lab.